VECTORS |
|
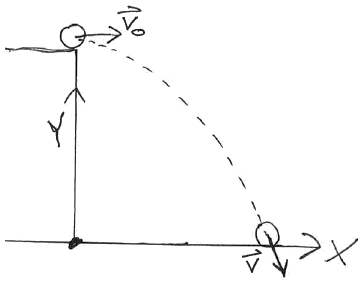
If we roll a ball off the edge of a table, it follows a path
through the air on the way to the ground.
The ball is no longer moving in
a straight line, so we'll need to use a 2D or 3D coordinate
system to fully describe it's motion.
An object moving in a straight line only needs a single
coordinate (x perhaps) to specify it's motion, but
an object moving arbitrarily through space potentially needs
x, y, and z to describe its position.
This (x,y,z) collection is essentially
the position vector of the object.
|
|
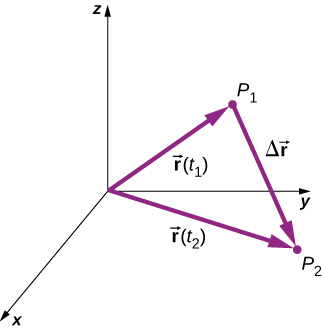
Position

|
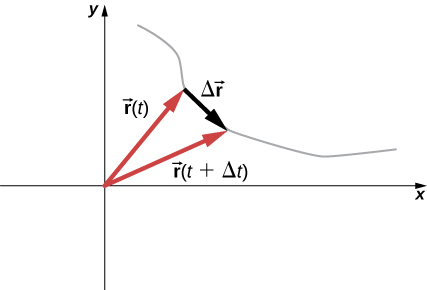
Displacement
|
|
Velocity
Average Velocity
Instantaneous Velocity
\( \vec{v}(t) = \frac{ d\vec{r} }{dt} \)
\( \vec{v}(t) = \frac{dx}{dt}\hat{i} + \frac{dy}{dt}\hat{j} + \frac{dz}{dt}\hat{k} \)
\( \vec{v}(t) = v_x\hat{i} + v_y\hat{j} + v_z\hat{k} \)
|
|
|
Average Acceleration
|
Instantaneous Acceleration
\( \vec{a}(t) = \frac{ d\vec{v} }{dt} \)
\( \vec{a}(t) = \frac{dv_x}{dt}\hat{i} + \frac{dv_y}{dt}\hat{j} + \frac{dv_z}{dt}\hat{k} \)
\( \vec{a}(t) = a_x\hat{i} + a_y\hat{j} + a_z\hat{k} \)
|
| Constant Acceleration |
|
\( \vec{a} \) is the slope of the \( \vec{v} \) 'graph' (in 2 or 3 dimensions)
IF \( \vec{a} \) is constant, then \( \vec{v}(t) \) is a line (in space)
such that \( d\vec{v}/dt = \vec{a} = constant \)
Requires:
\[ \vec{v}(t) = \vec{v}_o + \vec{a}t \]
|
| 1-D vs Vector Definitions and Equations |
Location |
x(t) |
\( \vec{r}(t) \) |
Displacement |
\( \Delta x = x(t_2)-x(t_1) \) |
\( \Delta \vec{r} = \vec{r}(t_2) - \vec{r}(t_1) \) |
Average velocity |
\( v_{avg} = \Delta x / \Delta t \) |
\( \vec{v}_{avg} = \Delta \vec{r} / \Delta t \) |
Instantaneous velocity |
\( v = dx/dt \) |
\( \vec{v} = d\vec{r}/dt \) |
Average acceleration |
\( a_{avg} = \Delta v / \Delta t \) |
\( \vec{a}_{avg} = \Delta \vec{v} / \Delta t \) |
Instantaneous acceleration |
\( a = dv/dt \) |
\( \vec{a} = d\vec{v}/dt \) |
| Constant Acceleration Equations of Motion |
Velocity |
\( v = v_o + at \) |
\( \vec{v} = \vec{v}_o + \vec{a}t \) |
Average Velocity |
\( v_{avg} = \frac{1}{2}( v_o + v ) = v_o + \frac{1}{2}at \) |
\( \vec{v}_{avg} = \frac{1}{2}( \vec{v}_o + \vec{v} ) = \vec{v}_o + \frac{1}{2}\vec{a}t \) |
Position |
\( x = x_o + v_{avg} t \) |
\( \vec{r} = \vec{r}_o + \vec{v}_{avg} t \) |
Position |
\( x = x_o + v_o t + \frac{1}{2}at^2 \) |
\( \vec{r} = \vec{r}_o + \vec{v}_o t + \frac{1}{2}\vec{a}t^2 \) |
Shortcut |
\( v^2 = v^2_o + 2 a \Delta x \) |
\( v^2 = v^2_o + 2 a_x \Delta x + 2 a_y \Delta y + 2 a_z \Delta z \) |
| Each VECTOR equation is really THREE equations |
|
Expanding out each term in: \( \vec{v} = \vec{v}_o + \vec{a}t \)
\[ (v_x\hat{i} + v_y\hat{j} + v_z\hat{k}) = (v_{ox}\hat{i} + v_{oy}\hat{j} + v_{oz}\hat{k}) + ( a_x\hat{i} + a_y\hat{j} + a_z \hat{k})t \] and separating out the i,j,k components, this becomes THREE equations:
\[ v_x = v_{ox} + a_x t \hspace{2em} v_y = v_{oy} + a_y t \hspace{2em} v_z = v_{oz} + a_z t \]
In practice then, 2-D and 3-D motion starts off with vector equations but
calculators (and computers) rarely work directly on vector
quantities, so we end up turning the problem into (potentially)
three separate problems: what's happening in X, Y and Z separately.
|
| Example : Ball rolling off table |
|
A ball moving (horizontally) at 2 m/s rolls off the side of a table that is 1.0 m above
the floor.
Where will the ball land?
How long does it take to reach the floor?
How fast is it moving when it hits the floor?
At what angle does the ball hit the floor?
(This is an example of a FORWARD problem: we know the initial conditions and are
trying to determine something about the object later on.)
|
|
| Example : Building Height |
|
Hilbun has a flat roof and we'd like to measure it's height.
We roll a ball along the roof (horizontally) at some unknown speed vo.
Exactly 1.60 sec later, the ball hits the flat ground below after travelling 10 m horizontally.
(a) What was the initial velocity of the ball?
(b) How tall is the building?
(c) How fast is the ball moving when it hits the ground?
(d) At what angle does the ball hit the ground?
(This is an example of a REVERSE problem: we know something about the final or later conditions
and are trying to 'reverse engineer' what the initial conditions must have been.)
|
|
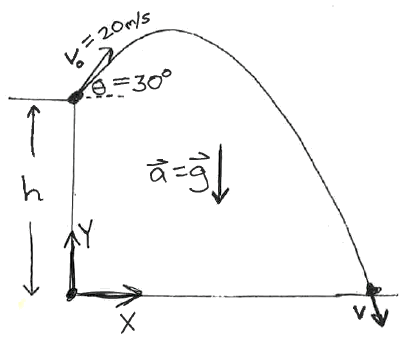
Example : Ball Kicked at an Angle (version 1)
|
|
A ball is kicked from the top edge of a 15 m tall building
at 20 m/s and at an angle of θ=30o
above the horizontal.
(Forward problem again.)
|
|
|
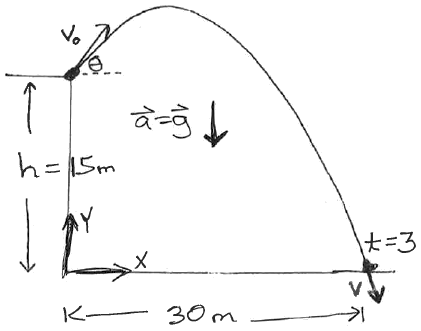
Example : Ball Kicked at an Angle (version 2)
|
|
A ball is kicked from the top edge of a 15 m tall building
at an unknown velocity and at an unknown angle.
Exactly 3 seconds later, it lands 30 m from the building.
Determine the velocity at which it was launched. (Velocity
is a vector, so we're looking for it's magnitude and direction.)
(Reverse problem this time.)
|
|
|
If the acceleration of an object is constant, it's
motion is constrained to fit our equations of motion.
We may have fragments of information, scattered between the initial
and final positions (a velocity here, a time there, ...), so we may have
to take different paths through the equations of motion depending on
the scenario, but the same equations apply.
|