Work Done by Varying (non-constant) Forces
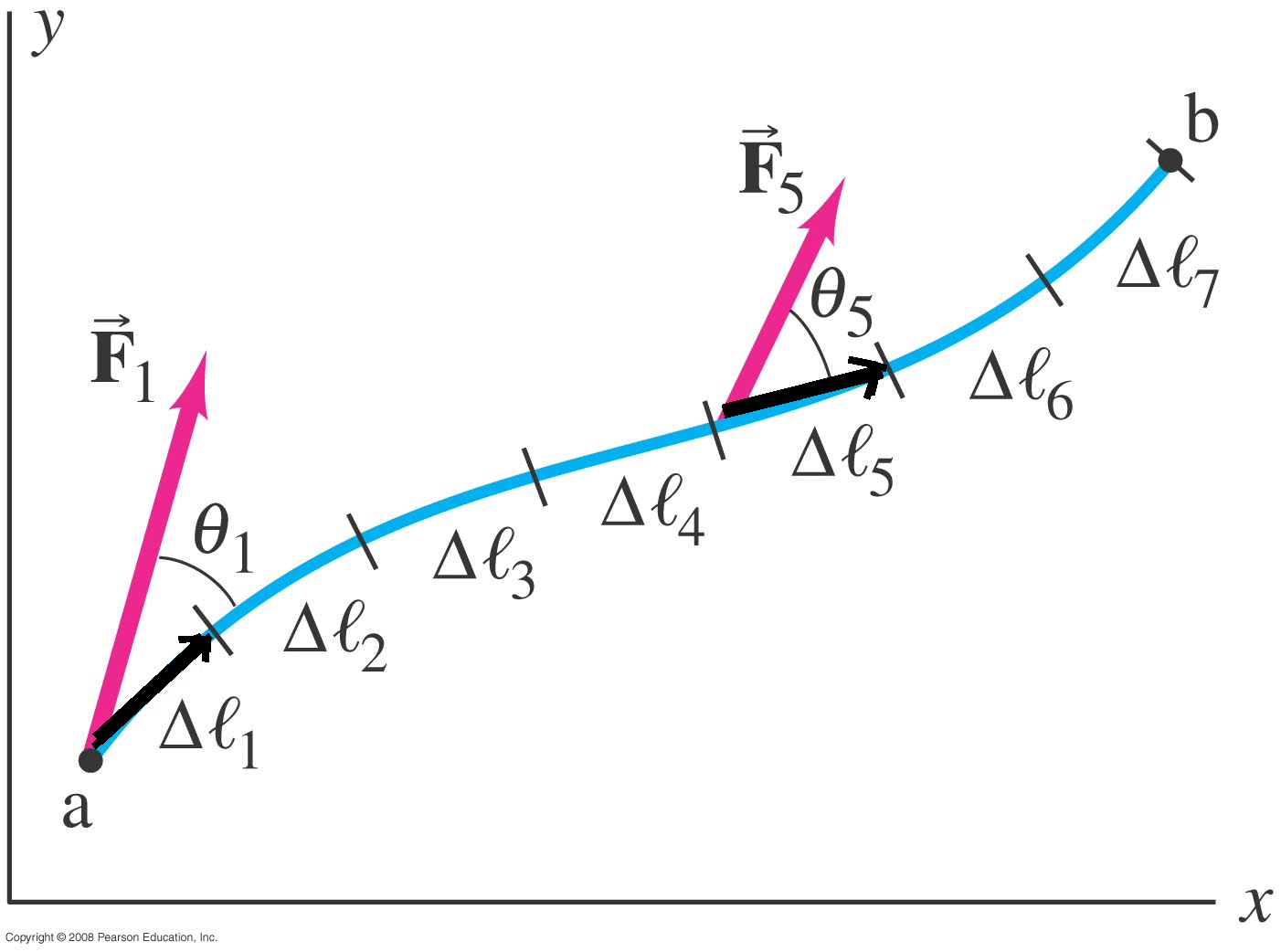
Suppose an object travels along a path from (a) to (b).
Multiple forces may be present, and some may not be constant (like the \( \vec{F} \) shown here).
On each little dl step, a tiny amount of work in done: ΔW:
\[ \Delta W_i = \vec{F}_i \cdot \Delta \vec{l}_i = F_i \Delta l_i \cos{\theta{i}} \]
Adding up all the steps:
\[ W = \sum \Delta W_i = \sum \vec{F}_i \cdot \Delta \vec{l}_i = \sum F_i \Delta l_i \cos{\theta{i}} \]
As we shrink the Δl steps down to infintesimal dl calculus steps, this becomes:
\[ W = \int_a^b \vec{F} \cdot d\vec{l} \]
If the force is constant, it comes out of the integral, leaving just:
\[ W = \vec{F} \cdot \int_a^b d\vec{l} \]
but that integral is just \( \vec{d} \) so we just have:
\[ W = \vec{F} \cdot \vec{d} \]
as we've been using so far.