Angular Velocity
As an object rotates, every point on that object rotates through the exact same angle θ
| Chapter 10 : Rotational Motion |
| Angular Velocity | |
|
As an object rotates, every point on that object rotates through the exact same angle θ |
|
|
|
|
|
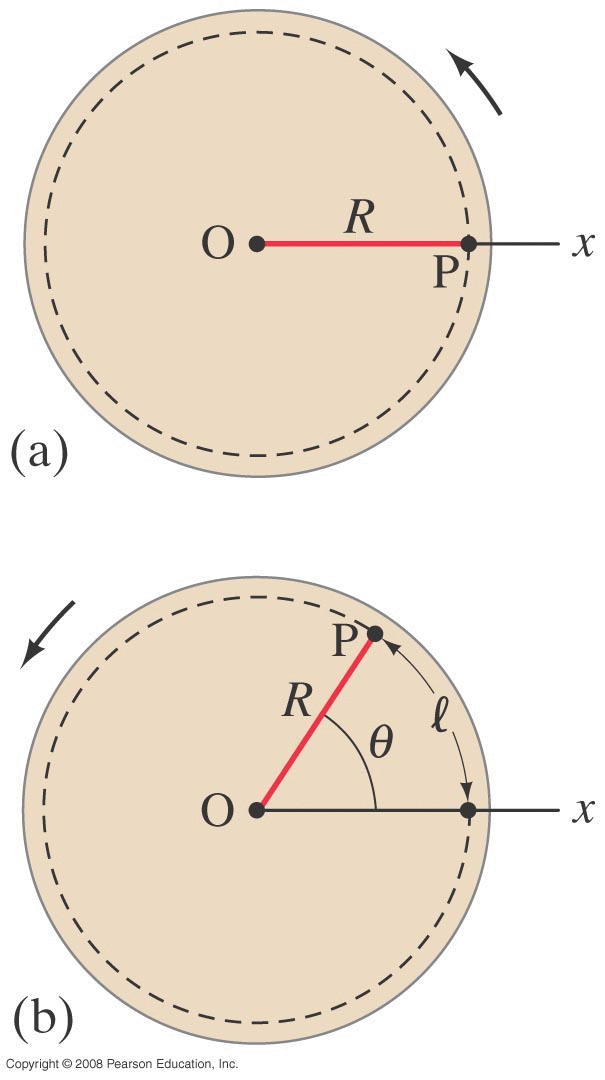
A point located a distance R from the axis of rotation
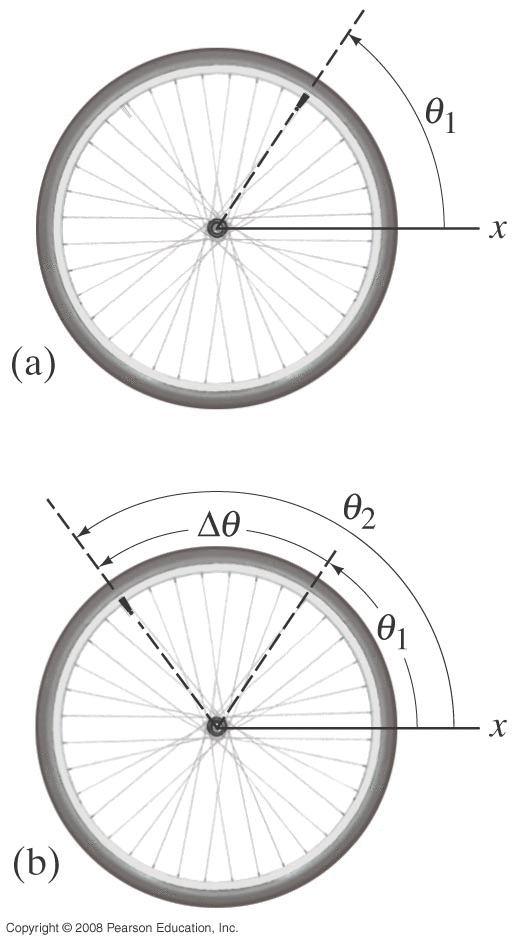
will trace out a distance (arc-length) of l = Rθ Note: θ = l/R defines an angle in units of radians BUT the units on the RHS cancel, so technically it's unitless If object rotates from θ1 at t1 to θ2 at t2 :
|
| Instantaneous Angular Velocity | |
|
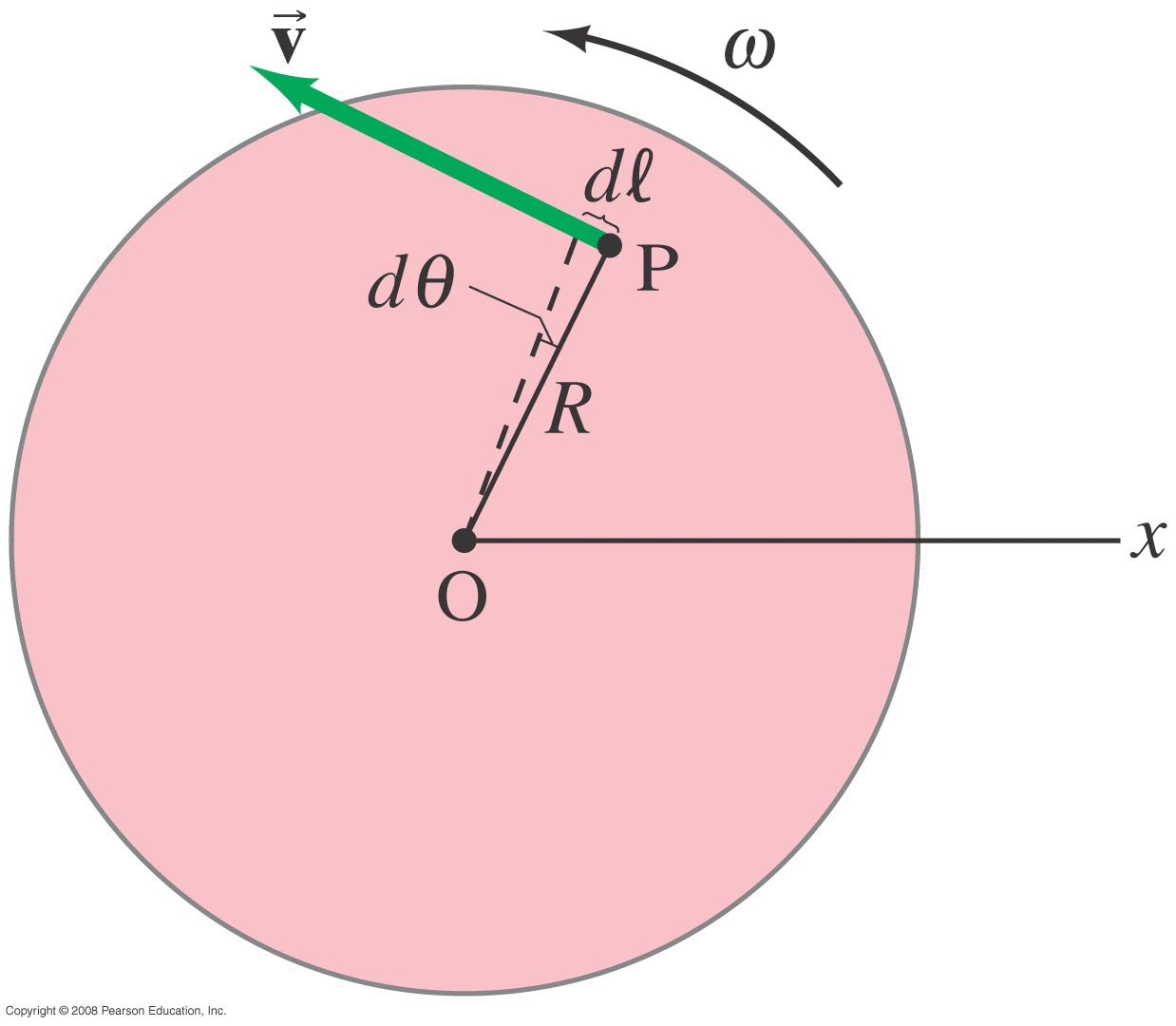
Calculus limit: Δt ➔ dt
ω=dθ/dt
Symbol: lowercase omega: ω not w Units: rad/s or really just s-1 |
|
Vector Nature of Angular Quantities | |
|
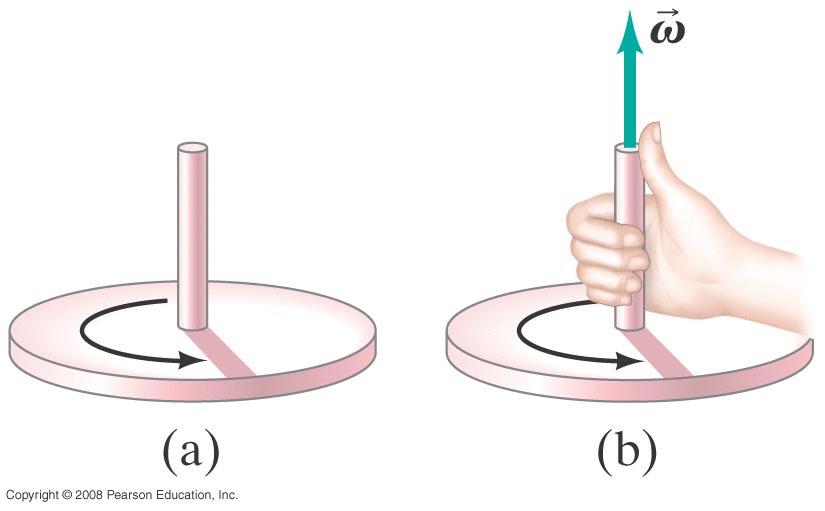
It's called an angular velocity (as opposed to angular speed) because it actually is a vector The vector part is defined to be the direction of the axis about which the rotation is occurring via a right-hand rule. |
|
Angular Acceleration | |
|
Average angular acceleration : αavg = Δω/Δt Instantaneous angular acceleration : α = dω/dt Symbol: lowercase alpha: α not a Units: (rad/s)/s or rad/s2 but really just s-2 | |
|
Angular Equations of Motion | |
Angular-motion equations |
Corresponding Linear-motion equation |
| \[ \omega = \omega_o + \alpha t \] |
\[ v = v_o + at \] |
| \[ \theta = \theta_o + \omega_{avg}t \] |
\[ x = x_o + v_{avg}t \] |
| \[ \theta = \theta_o + \omega_o t + \frac{1}{2}\alpha t^2 \] |
\[ x = x_o + v_o t + \frac{1}{2}at^2 \] |
| \[ \omega^2 = \omega^2_o + 2 \alpha \Delta \theta \] |
\[ v^2 = v^2_o + 2 a \Delta x \] |
| Useful Conversions |
|
1 cycle = 1 rev = 360o = 2π radians An object rotates through a full 360o (i.e. Δθ=2π radians) in one period (T), so:
|