Example: Merry-go-Round (angular equations of motion)
A Merry-go-Round takes 6 seconds to spin up from rest to reach it's final speed.
Once it's spun up and running at a constant speed, it takes 4 seconds to make each complete rotation.
What angular acceleration does this represent?
How many rotations does the MGR go through from rest until it reaches its operating speed?
Note : each rotation represents \( \Delta \theta = 2 \pi ~ ~ (radians) \)
One path: \( \theta = \theta_o + \omega_o t + \frac{1}{2}\alpha t^2 \)
Another: \( \omega_{avg} = \Delta \theta / \Delta t \)
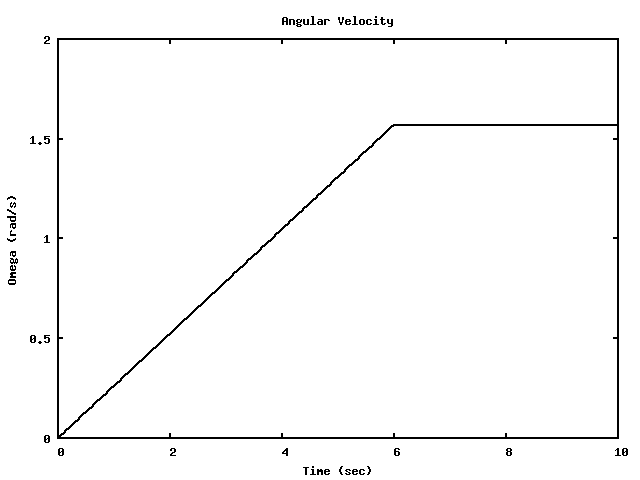
(Sketch a graph of ω vs time.)