Why we need this stuff!
Consider this simple scenario: a heavy beam resting on two jackstands.
Apply Newton's Laws to determine the forces each jackstand is exerting on the beam.
(Hint: you won't be able to find a solution!)
What happens if we remove one of them?
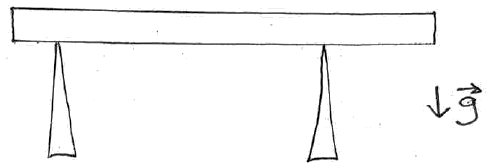
500 kg beam resting on two jackstands
This simple scenario can't be solved using the material prior to this chapter.
The solution will involve looking at the torques being created by each force acting on the beam, and that will be the focus of chapter 12.