Rotational Kinetic Energy
A rock is flying through the air, and while doing so it's rotating about it's center of mass. How much kinetic energy would the rock have?
The rock as a whole is a mass m flying at some (center-of-mass) speed v, so there's the usual kinetic energy of
\[ K = \frac{1}{2}mv^2 \]
but there's also kinetic energy in the rotation of the object about it's CM.
Getting the rotational part:
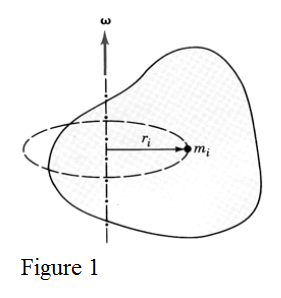
Break the object into an infinite number of infinitesimal little mass elements mi.
Each mi mass element is rotating about an axis through the center of mass of the object. Suppose the angular rotation speed (of the entire object) about this axis is ω.
This mi is located ri from the axis of rotation so it is moving in a circle of that radius at an angular speed of ω which represents a speed of vi=riω.
That means each little mi is also contributing an additional kinetic energy of:
\[ K_i = \frac{1}{2}m_i v^2_i \]
which we can write as:
\[ K_i = \frac{1}{2}m_i ( r_i \omega )^2 \]
Expanding:
\[ K_i = \frac{1}{2}m_i r^2_i \omega^2 \]
Summing these over the entire object:
\[ K = \sum K_i = \frac{1}{2} ( \sum m_i r^2_i ) \omega^2 \]
which is just:
\[ K = \sum K_i = \frac{1}{2} I \omega^2 \]
An object can potentially have both types of kinetic energy:
\[ K_{cm} = \frac{1}{2} m v^2_{cm} \]
\[ K_{rot} = \frac{1}{2} I \omega^2 \]
It's total kinetic energy then would be:
\[ K = K_{cm} + K_{rot} = \frac{1}{2} m v^2_{cm} + \frac{1}{2}I\omega^2 \]
Note: Kcm is sometimes called Ktrans (translational) in some books/fields.
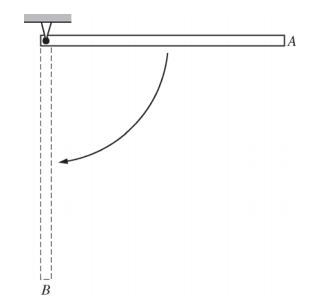
Note: if the object is purely rotating (even if the axis doesn't pass through the CM) it's almost always simpler to just treat it as pure rotation with \( K = \frac{1}{2}I \omega^2 \).
Rotational Energy: Flywheels
1-Cylinder Steam Engine Locomotive
Video (long, but the first few seconds shows a steam-powered shop that uses a large flywheel to store energy): video