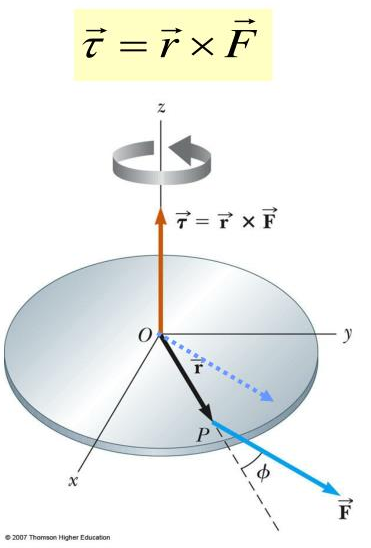
Torque
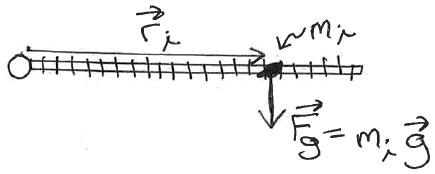
So far, our objects are flat, in the XY plane.
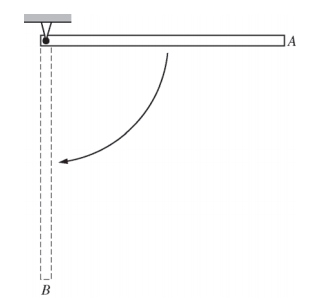
They're 'pinned' so they'll rotate about some axis coming up out of the page (Z axis).
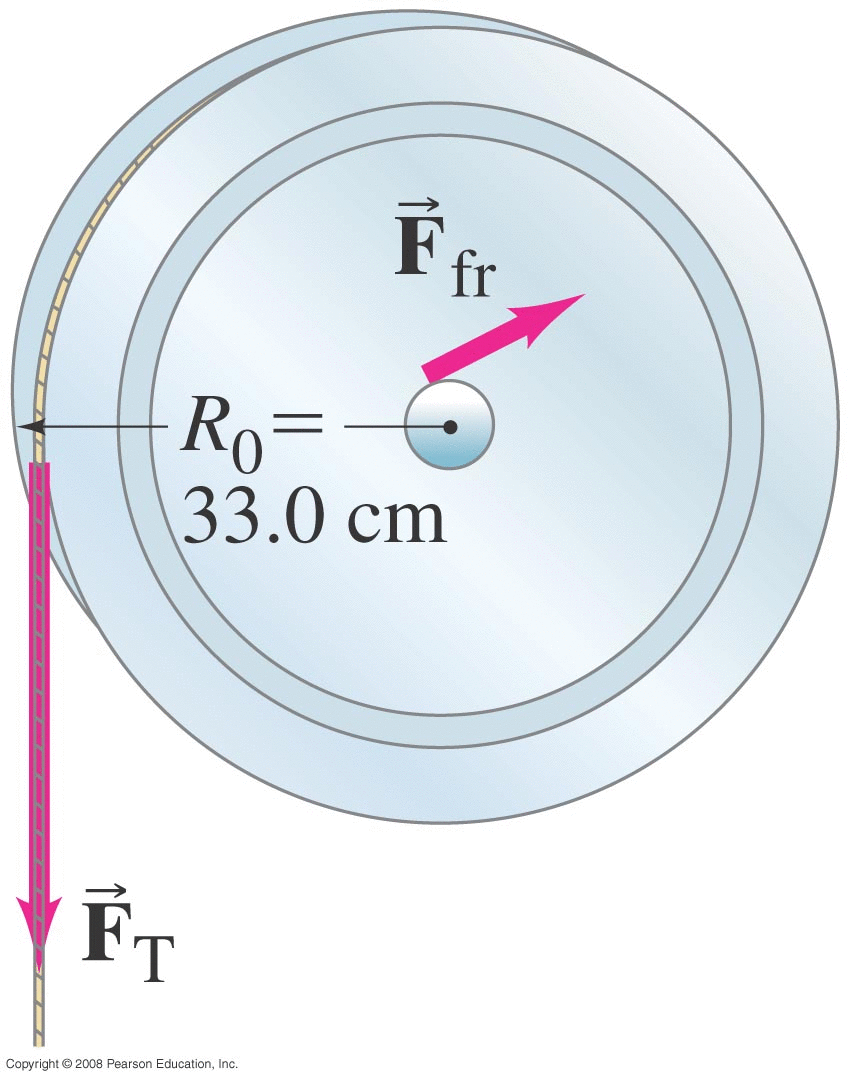
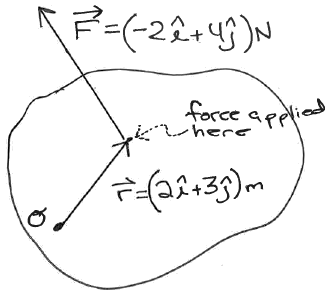
We apply a vector force F (also in the XY plane) to the object.
The vector r points from the axis of rotation to the point where the force is being applied.
This will create a torque about the axis of:
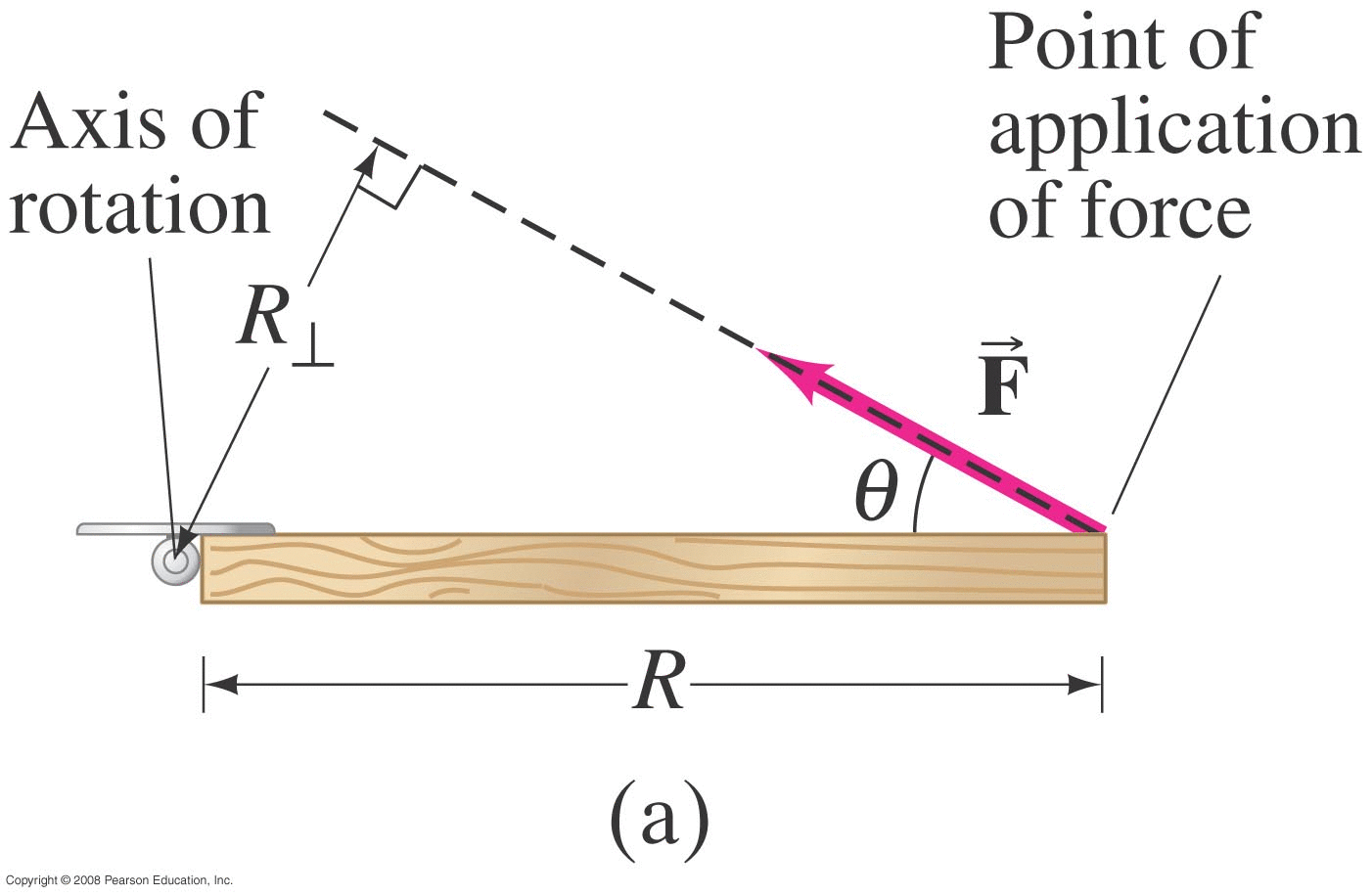
\[ |\tau| = rF_{tan} \]
which we can write as:
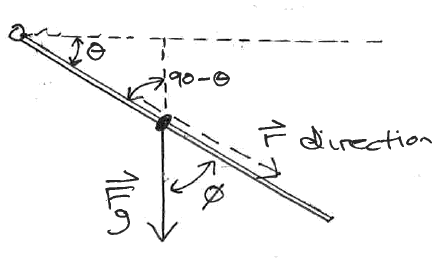
\[ |\tau| = rF\sin{\phi} \]
where \( \phi \) is the angle between the directions of the r and F vectors.
The sign of τ
POSITIVE if this force would induce a
counter-clockwise (CCW) rotationNEGATIVE if this force would induce a clockwise (CW) rotation
This torque will create an angular acceleration of:
\[ \tau = I\alpha \]
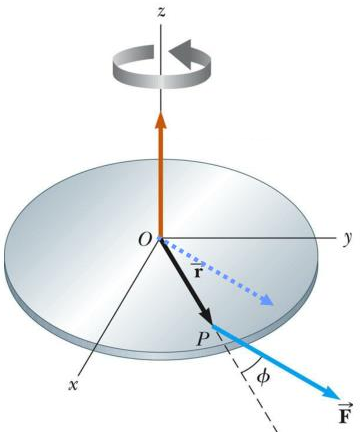
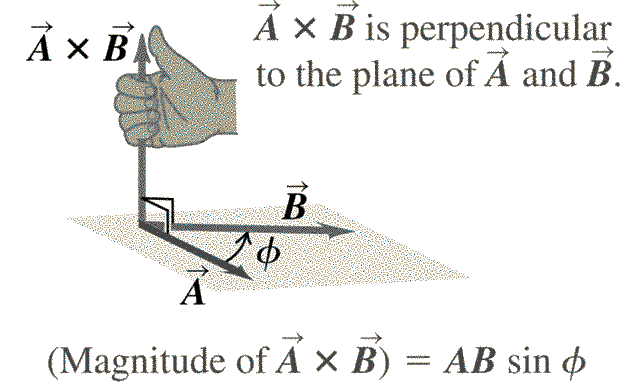
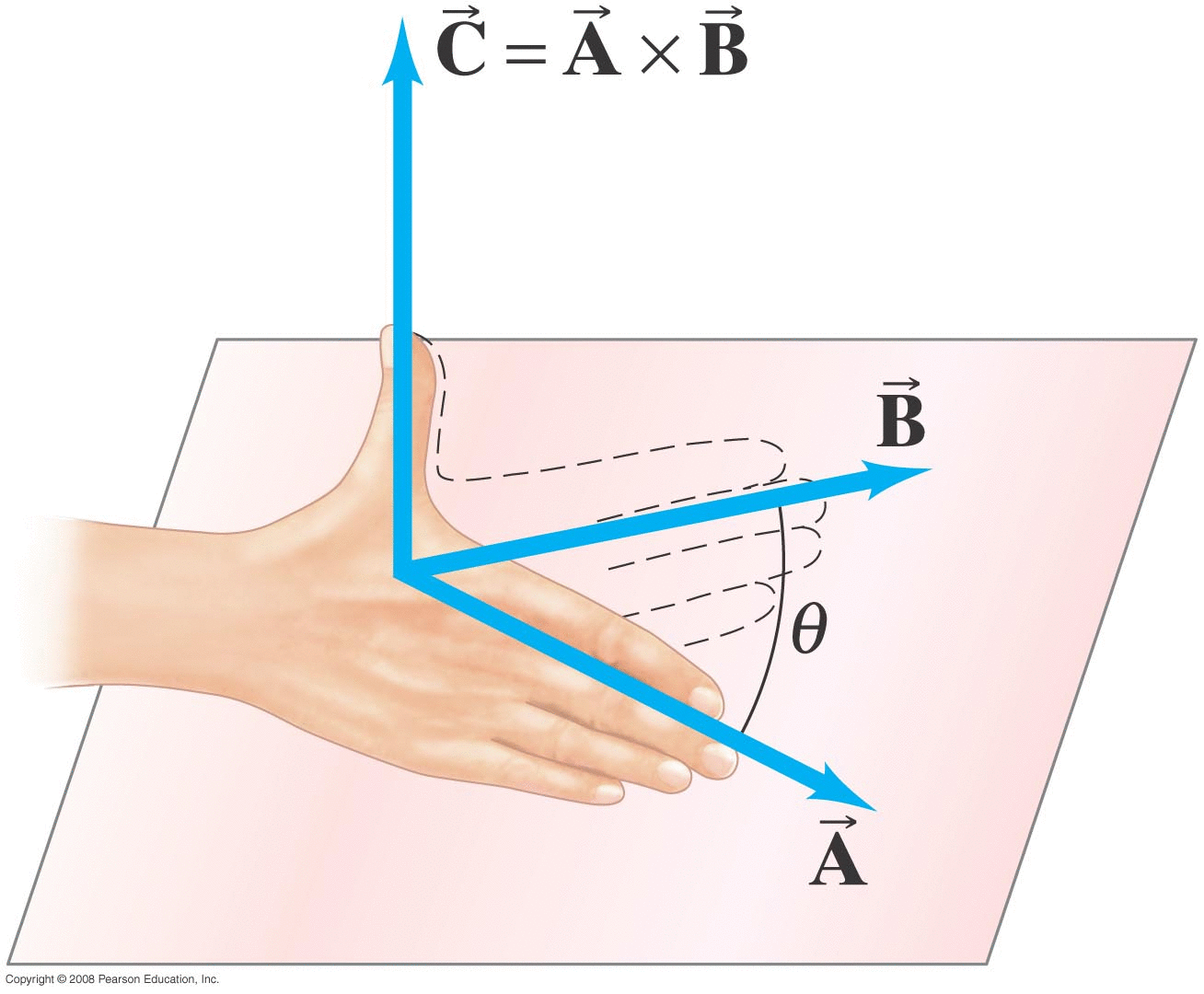
From geometry, any two (non-parallel) lines that intersect define a plane.
Here the r and F vectors define a plane and the axis about which rotation will occur is perpendicular to that plane.
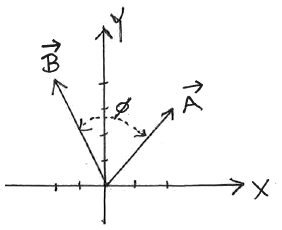
Is there a math-y way to denote this process: two vectors A and B that combine to create a third vector C that's perpendicular to the plane defined by the first two and has a magnitude of \( C=AB\sin{\phi} \) and the correct direction?