|
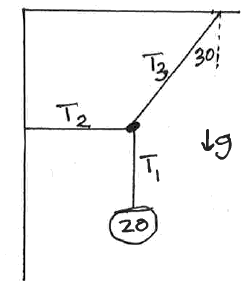
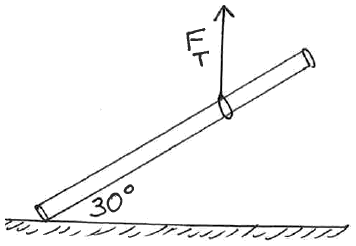
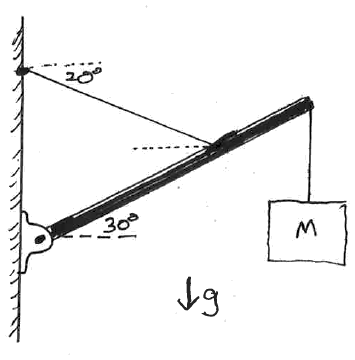
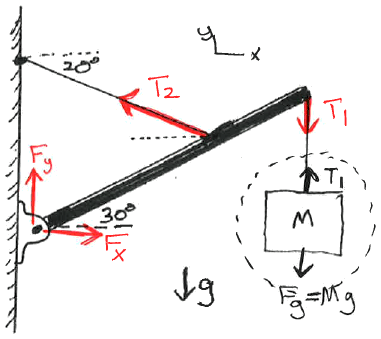
A store sign (of mass M=20 kg) is hanging from the end of a
3 m long pole (of negligible mass) as shown in the figure.
The pole makes an angle of 30o up from the horizontal.
A support wire is connected from the pole to the building,
making an angle of 20o below the horizontal, and connecting
to the pole 1 m in from the outer end of the pole.
Determine the tensions in the cables and the force(s) the left
end of the pole is exerting on the building.
(Note: a real pole would have some mass and
would contribute to the torque and force calculations,
but this example is more about propagating angles.)
|