Pendulums : Another Type of Periodic Motion
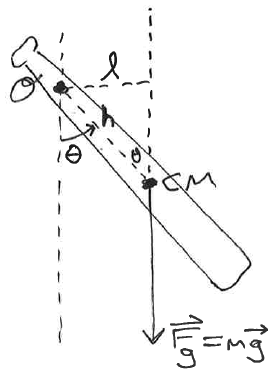
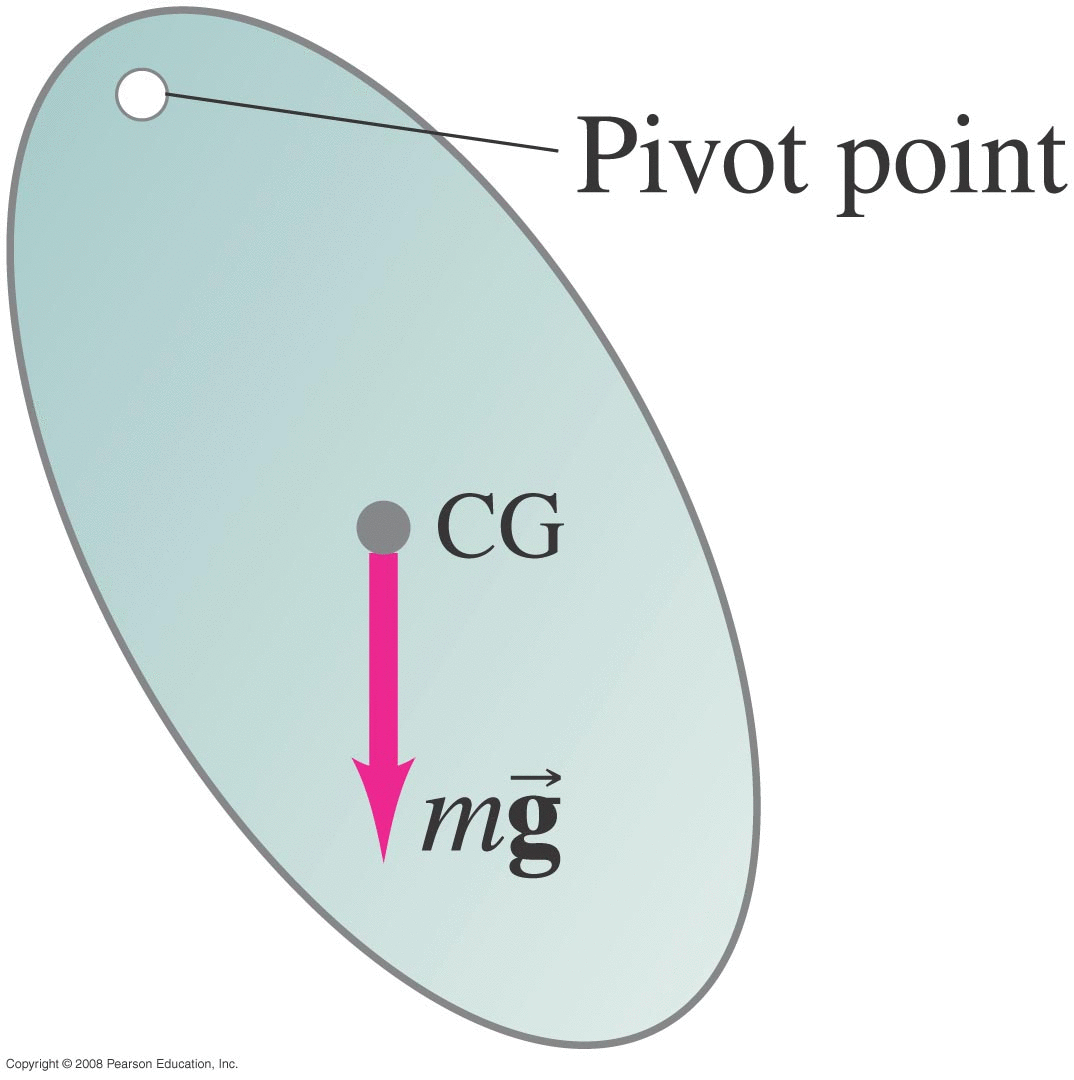
Suppose we have some object (like the baseball bat in this figure) that is constrained to rotate about some point (labelled O in the figure).
The object will ultimately be rotating about point O, so let's attack this via rotational equations and concepts like torque.
\[ \sum \vec{ \tau } = I \vec{ \alpha } \]
Each external force acting on the object produces a torque of:
\[ \vec{ \tau } = \vec{r} \times \vec{F} \]
Recall that (vector) r is a vector that points from the axis of rotation to the point where the (vector) force F is being applied.
What differential equation do we get this time?
(One that we can't easily solve, unfortunately...)